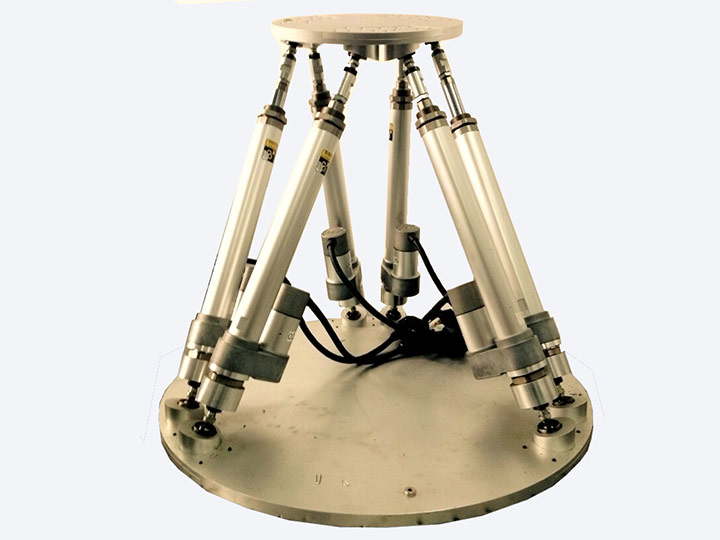
六自由度平台(DextStewart)是一种包含6个直线驱动装置并联的机器人,一般使用的是直线电机。这些驱动器被安装在一对机械平台上,其中上面的是动平台,下面的是基础平台,6个连杆在上部平台上形成3个固定点。装备被固定在动平台上,可以在6个自由度上移动和转动。这是三个方向的直线运动 x,y和z(横向,纵向和垂直方向),三个旋转运动(pitch, roll, & yaw)。因此“六轴”平台常用来代替Stewart工作平台



-
6个自由度
-
3个方向的连续转动
-
无电缆限制来改进可靠性和进度
-
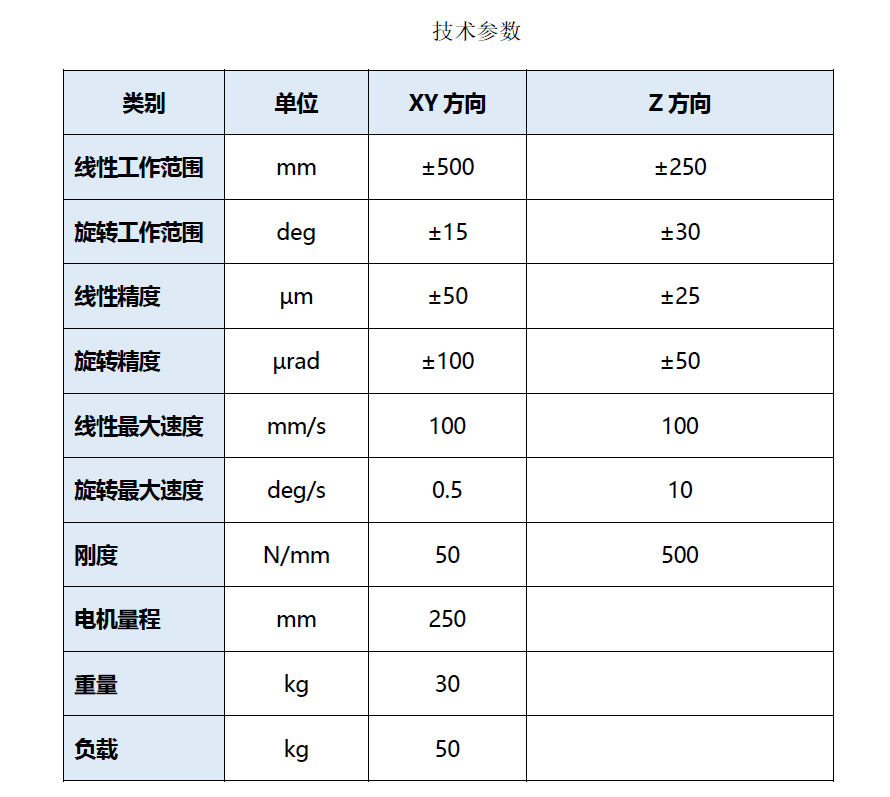
50 kg的负载能力
-
高精度和耐用性
-
可重复精度±10 µm
-
与其它六轴机器人相比有比较小的结构和较强的刚度
-
线性和旋转多轴扫描
-
虚拟中心旋转
-
高端控制器
Stewart工作平台是一种包含6个直线驱动装置并联的机器人,一般使用的是直线电机。这些驱动器被安装在一对机械平台上,其中上面的是动平台,下面的是基础平台,6个连杆在上部平台上形成3个固定点。装备被固定在动平台上,可以在6个自由度上移动和转动。这是三个方向的直线运动 x,y和z(横向,纵向和垂直方向),三个旋转运动(pitch, roll, & yaw)。因此“六轴”平台常用来代替Stewart工作平台。
由于动平台的运动是由几个类似千斤顶运动组合而形成,因此这种平台也被称为协同运动平台。由于协同效应(相互作用)之间的方式,驱动装置被编程使用。
大多数对机器人应用,对其刚度是有要求的。串联机器人可以通过使用高品质的旋转接头,通过调整以刚性的回应外部的力的方向,从而做到这一点。和串联机器人相比,并联机器人的主要缺点是运动空间有限。因为连杆可能会发生碰撞,并且每个连杆有5个被动角,每个都有它们的机械限制。并联机器人的另一个缺点是,他们在奇异位置完全失去了刚性(机器人获得有限或无限度的自由,这是不可控的,它变成摇晃或移动)。无累积误差,精度较高;驱动装置可置于定平台上或接近定平台的位置,这样运动部分重量轻,速度高,动态响应好;结构紧凑,刚度高,承载能力大;完全对称的并联机构具有较好的各向同性;工作空间较小;根据这些特点,并联机器人在需要高刚度、高精度或者大载荷而无须很大工作空间的领域内得到了广泛应用。
应用实例 |
|